

सामान्यतः असे मानले जाते की जर बेल्ट कन्व्हेयर ड्राइव्ह डिव्हाइस कॉन्फिगरेशन खूप जास्त असेल तर ते संसाधनांचा अपव्यय आहे. तथापि, मोठ्या उपकरणांसाठी, जर ते खूप कमी असेल, तर बेल्ट सुरू केल्यावर डायनॅमिक तणाव वाढेल आणि बेल्टला प्रतिध्वनी देखील कारणीभूत होईल. बेल्ट कन्व्हेयरच्या डिझाइनमध्ये ड्रायव्हिंग डिव्हाइस वाजवीपणे कसे निवडायचे हे महत्त्वाचे आहे. डिझाइन वाजवी आहे की नाही, ऑपरेशन सामान्य आहे की नाही आणि देखभाल खर्च आणि देखभाल व्हॉल्यूम कमी आहे की नाही हा देखील एक कळीचा मुद्दा आहे. हा लेख संदर्भासाठी अनेक सामान्य ड्रायव्हिंग पद्धतींचे अनुप्रयोग, फायदे आणि तोटे यांचे विश्लेषण करतो.

1. इलेक्ट्रिक रोलर
इलेक्ट्रिक ड्रम अंगभूत इलेक्ट्रिक ड्रम आणि बाह्य इलेक्ट्रिक ड्रममध्ये विभागलेले आहेत. त्यांच्यातील मुख्य फरक असा आहे की अंगभूत इलेक्ट्रिक ड्रमची मोटर ड्रमच्या आत स्थापित केली जाते, तर बाह्य इलेक्ट्रिक ड्रमची मोटर ड्रमच्या बाहेर स्थापित केली जाते आणि ड्रमशी कठोरपणे जोडलेली असते.
बिल्ट-इन इलेक्ट्रिक ड्रममध्ये उष्णता कमी होते कारण ड्रमच्या आत मोटर स्थापित केली जाते. हे सामान्यतः 30kw पेक्षा कमी आणि 150m पेक्षा कमी लांबीच्या बेल्ट कन्व्हेयर्सवर वापरले जाते. मोटार ड्रमच्या बाहेर स्थापित केल्यामुळे, बाह्य इलेक्ट्रिक ड्रममध्ये चांगले उष्णता नष्ट होते. हे साधारणपणे 45kw पेक्षा कमी आणि 150m पेक्षा कमी लांबीच्या बेल्ट कन्व्हेयर्सवर वापरले जाते.
फायदे: कॉम्पॅक्ट स्ट्रक्चर, कमी देखभाल खर्च, उच्च विश्वासार्हता, ड्रायव्हिंग डिव्हाइस आणि ट्रान्समिशन रोलर एकामध्ये एकत्रित केले आहेत.
तोटे: खराब सॉफ्ट स्टार्ट कार्यप्रदर्शन, मोटर सुरू झाल्यावर पॉवर ग्रिडवर मोठा प्रभाव. विश्वसनीयता Y-प्रकार मोटर + कपलिंग + रिड्यूसर ड्राइव्ह पद्धतीपेक्षा वाईट आहे.
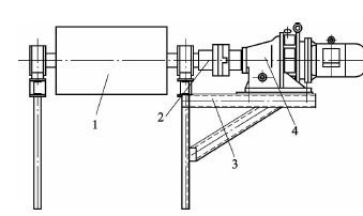
2. वाई-प्रकार मोटर + कपलिंग + रिड्यूसरचा खराब ड्रायव्हिंग मोड
फायदे: साधी रचना, लहान देखभाल वर्कलोड, कमी देखभाल खर्च आणि उच्च विश्वसनीयता.
तोटे: खराब सॉफ्ट स्टार्ट कार्यप्रदर्शन, मोटर सुरू झाल्यावर पॉवर ग्रिडवर मोठा प्रभाव. साधारणपणे 45kw पेक्षा कमी आणि 150m पेक्षा कमी लांबीच्या बेल्ट कन्व्हेयर्सवर वापरला जातो.
3. Y-प्रकार मोटर + टॉर्क मर्यादित करणारे द्रव कपलिंग + रेड्यूसर
हे बेल्ट कन्व्हेयर्सवर मोठ्या प्रमाणावर वापरले जाणारे ड्रायव्हिंग डिव्हाइस आहे, जे साधारणपणे 630kw पेक्षा कमी आणि 1500m पेक्षा कमी लांबीच्या एका पॉवरच्या बेल्ट कन्व्हेयरमध्ये वापरले जाते.
आयत-मर्यादित द्रवपदार्थ कपलिंग मागील सहाय्यक चेंबरसह आयत-मर्यादित द्रव कपलिंग आणि मागील सहाय्यक चेंबरशिवाय आयत-मर्यादित द्रव कपलिंगमध्ये विभागले गेले आहे. कारण जेव्हा मोटर सुरू होते तेव्हा थ्रॉटल होलमधून थ्रॉटल होलमधून फ्लुइड कपलिंगच्या कार्यरत पोकळीमध्ये पूर्वीचा प्रवेश होतो, तेव्हा त्याची सुरुवातीची कामगिरी नंतरच्या पेक्षा चांगली असते.
जर मागील सहाय्यक कक्ष असलेली एक निवडली असेल, तर द्रव कपलिंगचे दोन मॉडेल त्याच्या प्रसारण शक्तीची पूर्तता करू शकतील, तर द्रव कपलिंगची दीर्घ सुरुवातीची वेळ आणि मोठ्या उष्णता निर्मितीमुळे, द्रव कपलिंगच्या मोठ्या प्रकाराला प्राधान्य दिले पाहिजे.
जर मागील सहाय्यक कक्ष नसलेला एक निवडला असेल, जेव्हा द्रव जोडणीचे दोन मॉडेल त्याच्या प्रसारण शक्तीची पूर्तता करू शकतात, तर द्रव कपलिंगच्या लहान प्रकाराला प्राधान्य दिले पाहिजे कारण द्रव जोडणीची सुरुवातीची वेळ कमी असते आणि उष्णता निर्मिती कमी असते.
एकाधिक मोटर्सद्वारे चालविल्या जाणाऱ्या बेल्ट कन्व्हेयर्ससाठी, जर ही ड्राइव्ह पद्धत निवडली असेल, तर रियर ऑक्झिलरी चेंबर टॉर्क लिमिटिंग प्रकार फ्लुइड कपलिंगसह फ्लुइड कपलिंग निवडण्याची शिफारस केली जाते.
फायदे: किफायतशीर, साधी आणि संक्षिप्त रचना, लहान देखभाल कार्यभार, कमी देखभाल खर्च, संरक्षण मोटर ओव्हरलोड, जेव्हा एकाधिक मोटर्स चालविल्या जातात तेव्हा मोटारची उर्जा संतुलित केली जाऊ शकते, विलंब सुरू होणे स्थानकांमध्ये विभागले जाऊ शकते आणि बेल्ट कन्व्हेयर सुरू केल्यावर पॉवर ग्रिडवर होणारा प्रभाव कमी केला जातो, विश्वसनीयता कमी असते, प्रीव्हेटिंग मोडसाठी किंमत जास्त असते, आणि ते जास्त असते. 1500m पेक्षा कमी लांबीचे कन्वेयर.
तोटे: सॉफ्ट स्टार्ट कार्यप्रदर्शन खराब आहे, आणि बेल्ट कन्व्हेयरचा वापर डाऊनवर्ड ट्रान्सपोर्टेशन बेल्ट कन्व्हेयरसाठी आणि बेल्ट कन्व्हेयरसाठी योग्य नाही ज्यासाठी स्पीड रेग्युलेशन फंक्शन आवश्यक आहे.
4. Y-प्रकार मोटर + स्पीड-रेग्युलेटिंग फ्लुइड कपलिंग + रिड्यूसर
मोठ्या बेल्ट कन्व्हेयर्ससाठी सामान्यतः वापरली जाणारी ड्रायव्हिंग पद्धत, जी सामान्यतः 800m पेक्षा जास्त लांबीच्या लांब-अंतराच्या मोठ्या बेल्ट कन्व्हेयरवर वापरली जाते.
फायदे: रचना सोपी आहे, ओव्हरलोड देखभाल कामाचा भार लहान आहे, मोटार लोड न करता सुरू होते, मोटर ओव्हरलोड होते, जेव्हा अनेक मोटर चालविल्या जातात तेव्हा ते सुरू होण्यास उशीर होऊ शकतो, बेल्ट कन्व्हेयरचा पॉवर ग्रिड सुरू झाल्यावर त्याचा प्रभाव कमी होतो, विश्वासार्हता जास्त असते, सॉफ्ट स्टार्ट कार्यप्रदर्शन चांगले असते, आणि स्टार्टअप वेळेवर नियंत्रण ठेवता येते. नियंत्रण करण्यायोग्य, स्टार्ट-अप गती वक्र नियंत्रण करण्यायोग्य आहे आणि किंमत कमी आहे.
तोटे: जेव्हा फ्लुइड कपलिंग सुरू होते, कारण फ्लुइड कपलिंगच्या कार्यरत पोकळीतील ऑइल व्हॉल्यूम चेंज आणि स्पीड चेंज वक्र नॉन-रेषीय असतात आणि त्यात मागासपणा असतो, कंट्रोल करण्यायोग्य डायनॅमिक रिस्पॉन्स मंद असतो आणि क्लोज-लूप कंट्रोल करणे कठीण होते आणि काहीवेळा तेल गळती होते. हे डाउनवर्ड कन्व्हेयर बेल्ट कन्वेयरसाठी योग्य नाही आणि स्पीड रेग्युलेशन फंक्शनसह बेल्ट कन्व्हेयर आवश्यक आहे.

5. Y-प्रकार मोटर + CST ड्राइव्ह उपकरण
Y-प्रकार मोटर + CST ड्राइव्ह उपकरण हे युनायटेड स्टेट्सच्या डॉज कंपनीने बेल्ट कन्व्हेयरसाठी डिझाइन केले आहे, मेकाट्रॉनिक्स ड्राईव्ह उपकरणाच्या उच्च विश्वासार्हतेसह, सामान्यतः 1000m पेक्षा जास्त लांबीच्या लांब-अंतराच्या मोठ्या बेल्ट कन्व्हेयरमध्ये वापरले जाते.
फायदे: चांगली सॉफ्ट स्टार्ट परफॉर्मन्स, स्टार्ट करताना रेखीय आणि कंट्रोल करण्यायोग्य स्पीड वक्र, पार्किंग करताना स्पीड वक्र कंट्रोल करण्यायोग्य, बंद-लूप कंट्रोल केले जाऊ शकते, मोटर नो-लोड स्टार्ट, साधी रचना, लहान देखभाल वर्कलोड, जेव्हा अनेक मोटर्स चालविल्या जातात तेव्हा टप्प्याटप्प्याने सुरू होण्यास उशीर होऊ शकतो आणि पॉवर सुरू करताना बेल्ट कन्व्हेयरचा प्रभाव कमी होतो.
तोटे: देखभाल कामगार आणि वंगण तेलासाठी उच्च आवश्यकता, उच्च उपकरणांची किंमत. हे डाउनवर्ड कन्व्हेयर बेल्ट कन्वेयरसाठी योग्य नाही आणि स्पीड रेग्युलेशन फंक्शनसह बेल्ट कन्व्हेयर आवश्यक आहे.
6. विंडिंग मोटर + रेड्यूसर
वाइंडिंग मोटर + रिड्यूसरचे तीन नियंत्रण मोड आहेत:
पहिला प्रकार: जखमेच्या मोटर स्ट्रिंग वारंवारता प्रतिरोधक किंवा पाणी प्रतिकार;
गती नियमन कार्य नाही, आणि मोटर वारंवार सुरू केली जाऊ शकत नाही, साधारणपणे 500m पेक्षा जास्त लांबीच्या बेल्ट कन्व्हेयरमध्ये वापरली जाते आणि मोटर वारंवार सुरू होत नाही.
दुसरा प्रकार: वायर-जखमे मोटर स्ट्रिंग मेटल रेझिस्टर;
गती नियमन कार्य नाही, परंतु मोटर वारंवार सुरू केली जाऊ शकते आणि थायरिस्टर पॉवरसह ब्रेकिंग केल्यानंतर, खाली जाणाऱ्या बेल्ट कन्व्हेयर्ससाठी ही सामान्य ड्रायव्हिंग पद्धत आहे.
तिसरा प्रकार: विंडिंग मोटरचे कॅस्केड गती नियमन.
यात वेग नियमनाचे कार्य आहे, ते बंद-लूप नियंत्रणासाठी वापरले जाऊ शकते आणि सामान्यतः 1000m पेक्षा जास्त अंतर असलेल्या मोठ्या बेल्ट कन्व्हेयरमध्ये वापरले जाते आणि वेग नियमन कार्य असते.
फायदे: प्रथम आणि द्वितीय नियंत्रण पद्धती, साधी रचना, लहान देखभाल कार्यभार, चांगली सॉफ्ट स्टार्ट कामगिरी, कमी किंमत, प्रारंभ करताना पॉवर ग्रिडवर लहान प्रभाव, उच्च विश्वासार्हता, चांगली नियंत्रणीय कामगिरी; तिसऱ्या कंट्रोल मोडमध्ये उत्कृष्ट पॉवर ब्रेकिंग कार्यप्रदर्शन आहे.
तोटे: प्रथम आणि द्वितीय नियंत्रण मोड सुरू करताना आणि थांबवताना मोठ्या प्रमाणात ऊर्जा वापरतात; तिसरी नियंत्रण मोड प्रणाली जटिल आहे, आणि पर्यायी वारंवारता किंवा पर्यायी वारंवारता बदलण्याची प्रवृत्ती आहे.
7. हाय-स्पीड डीसी मोटर + रेड्यूसर
स्पीड रेग्युलेशन फंक्शनसह ड्राइव्ह मोड, जो सामान्यतः मोठ्या बेल्ट कन्व्हेयरमध्ये वापरला जातो ज्यांना स्पीड रेग्युलेशन फंक्शन आवश्यक असते.
फायदे: चांगली सॉफ्ट स्टार्ट परफॉर्मन्स, स्टार्टिंग दरम्यान रेखीय कंट्रोलेबल स्पीड वक्र, पार्किंग करताना रेखीय कंट्रोलेबल स्पीड वक्र, चांगले इलेक्ट्रिकल ब्रेकिंग परफॉर्मन्स, स्टेपलेस स्पीड चेंज, उत्कृष्ट कंट्रोलेबल परफॉर्मन्स, क्लोज-लूप कंट्रोल करू शकते, उच्च विश्वासार्हता.
तोटे: किंमत खूप महाग आहे, थायरिस्टर रेक्टिफायर सिस्टम क्लिष्ट आहे, इलेक्ट्रॉनिक नियंत्रण उपकरणे मोठ्या क्षेत्राला व्यापतात, पॉवर फॅक्टर कमी आहे, DC मोटरमध्ये स्लिप रिंग आहेत, ब्रशचा पोशाख मोठा आहे, देखभाल कामाचा ताण मोठा आहे, सध्या कोणताही स्फोट-प्रूफ प्रकार नाही आणि कोळसा खाणींमध्ये त्याचा वापर केला जाऊ शकत नाही.

8. लो-स्पीड डीसी मोटर बेल्ट कन्व्हेयरच्या ड्राइव्ह रोलरला थेट चालवते
स्पीड रेग्युलेशन फंक्शनसह ड्रायव्हिंग मोड सामान्यत: मोठ्या बेल्ट कन्व्हेयरवर वापरला जातो ज्यासाठी स्पीड रेग्युलेशन फंक्शन आणि 1000kw पेक्षा जास्त एकल मोटर पॉवरसह बेल्ट कन्व्हेयर आवश्यक आहे.
फायदे: उत्कृष्ट सॉफ्ट स्टार्ट परफॉर्मन्स, स्टार्ट करताना रेखीय कंट्रोलेबल स्पीड वक्र, पार्किंग करताना रेखीय कंट्रोलेबल स्पीड वक्र, चांगले इलेक्ट्रिकल ब्रेकिंग परफॉर्मन्स, स्टेपलेस स्पीड चेंज, उत्कृष्ट कंट्रोलेबल परफॉर्मन्स, क्लोज-लूप कंट्रोल, रिड्यूसर नाही, उच्च विश्वासार्हता.
तोटे: किंमत खूप महाग आहे, थायरिस्टर रेक्टिफायर सिस्टम क्लिष्ट आहे, इलेक्ट्रॉनिक नियंत्रण उपकरणे मोठ्या क्षेत्राला व्यापतात, पॉवर फॅक्टर कमी आहे, DC मोटरमध्ये स्लिप रिंग आहेत, ब्रशचा पोशाख मोठा आहे, देखभाल कामाचा ताण मोठा आहे आणि सध्याच्या उच्च-शक्तीचा नॉन-स्फोट-प्रूफ प्रकार कोळसा खाणीमध्ये वापरला जाऊ शकत नाही.
9. वारंवारता रूपांतरण गती नियंत्रित करणारे मोटर + रेड्यूसर
वारंवारता रूपांतरण गती मोटर + रीड्यूसरसाठी दोन नियंत्रण पद्धती आहेत:
पहिला प्रकार: प्रतिच्छेदन आणि पर्यायी वारंवारता रूपांतरण
अल्टरनेटिंग फ्रिक्वेंसी रूपांतरण प्रणालीचा पॉवर फॅक्टर कमी आहे आणि स्टार्ट-अप आणि ऑपरेशन दरम्यान मोठ्या संख्येने उच्च-ऑर्डर हार्मोनिक्स तयार होतील, ज्यामुळे पॉवर ग्रिडमध्ये प्रदूषण होईल. मोटरच्या वारंवार सुरू होण्यामुळे पॉवर ग्रिडवर मोठ्या प्रमाणात रिऍक्टिव्ह पॉवर इफेक्ट देखील होतो, ज्याचे सर्वसमावेशक व्यवस्थापन केले पाहिजे. वारंवारता रूपांतरण उपकरणांमध्ये गुंतवणूक तुलनेने कमी आहे.
दुसरा प्रकार: अदलाबदल हा पर्यायी वारंवारता रूपांतरण आहे
अल्टरनेटिंग फ्रिक्वेंसी कन्व्हर्जन सिस्टीममध्ये फिल्टर युनिट आणि कॉम्पेन्सेशन युनिटसह सुसज्ज असल्यामुळे, पॉवर फॅक्टर ०.९ पेक्षा जास्त आहे, उच्च हार्मोनिक घटक खूपच लहान आहे आणि त्यामुळे हार्मोनिक प्रदूषण होणार नाही, आणि हार्मोनिक शोषण आणि रिॲक्टिव्ह पॉवर सेट अप करण्याची आवश्यकता नाही, परंतु सिंगल पॉवर कॉम्पेन्सेशन 0.9 पेक्षा जास्त आहे. चीनमध्ये सध्या फ्रिक्वेन्सी कन्व्हर्जन सिस्टीम तयार करता येत नाही आणि उपकरणे आणि सुटे भाग आयात करणे आवश्यक आहे, जे पहिल्या गुंतवणुकीत तुलनेने जास्त आहे. हे सामान्यतः मोठ्या बेल्ट कन्व्हेयर्समध्ये वापरले जाते ज्यांना गती नियमन कार्ये आवश्यक असतात.
फायदे: उत्कृष्ट सॉफ्ट स्टार्ट परफॉर्मन्स, स्टार्ट करताना रेखीय कंट्रोलेबल स्पीड वक्र, पार्किंग करताना रेखीय कंट्रोलेबल स्पीड वक्र, चांगले इलेक्ट्रिकल ब्रेकिंग परफॉर्मन्स, स्टेपलेस स्पीड चेंज, उत्कृष्ट कंट्रोलेबल परफॉर्मन्स, क्लोज-लूप कंट्रोल, उच्च विश्वासार्हता.
तोटे: किंमत खूप महाग आहे, इलेक्ट्रॉनिक नियंत्रण उपकरणे मोठ्या क्षेत्राला व्यापतात, वर्तमान सिंगल पॉवर 400kw नॉन-स्फोट-प्रूफ प्रकारापेक्षा जास्त आहे, कोळशाच्या खाणींमध्ये वापरली जाऊ शकत नाही.
बेल्ट कन्व्हेयरचे ड्राइव्ह डिव्हाइस निवडताना, बेल्ट कन्व्हेयरच्या विविध ड्रायव्हिंग मोडचे फायदे आणि तोटे यांचे वरील विश्लेषणाद्वारे:
बेल्ट कन्व्हेयरसाठी ज्यांना गती नियमनाची आवश्यकता नाही आणि बेल्ट कन्व्हेयरची लांबी 1500m पेक्षा कमी आहे, Y-प्रकार मोटर + टॉर्क मर्यादित करणारे द्रव कपलिंग + रीड्यूसर हा त्याचा पसंतीचा ड्रायव्हिंग मोड आहे, त्यानंतर वाइंडिंग मोटर + रिड्यूसर (नियंत्रण मोड म्हणजे विंडिंग मोटर स्ट्रिंग मेटल रेझिस्टन्स);
जर बेल्ट कन्व्हेयरची लांबी 1500m पेक्षा जास्त असेल, तर Y-प्रकार मोटर + CST ड्राइव्ह डिव्हाइस ही प्राधान्यकृत ड्रायव्हिंग पद्धत आहे, त्यानंतर Y-प्रकार मोटर + स्पीड-रेग्युलेटिंग फ्लुइड कपलिंग + रिड्यूसर.
बेल्ट कन्व्हेयरच्या रहदारीचे प्रमाण मोठ्या प्रमाणात बदलते आणि वेगाचे नियमन आवश्यक असल्यास, वारंवारता रूपांतरण गती नियमन मोटर + रीड्यूसर ही त्याची पसंतीची ड्रायव्हिंग पद्धत आहे, त्यानंतर कॅस्केड स्पीड रेग्युलेशन + वाइंडिंग मोटरचे रिड्यूसर.










